

NX MCD 的全称是 NX Mechatronics Concept Designer,即机电概念设计解决方案。它是西门子Siemens Digital Industries Software推出的,基于NX 和 Teamcenter 平台的一款物理场建模与仿真工具。
它的核心思想是:在物理样机制造之前,在虚拟环境中创建、仿真和优化机电一体化系统的数字化双胞胎。
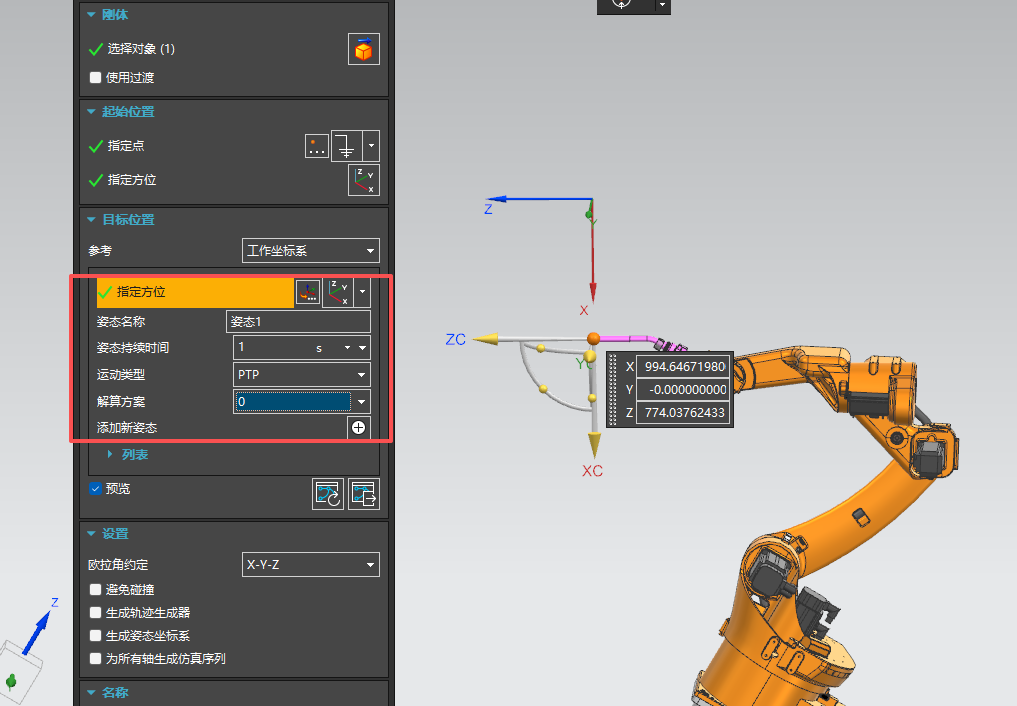
1. PTP – 点到点
-
全称: Point-to-Point
-
中文: 点到点运动
-
核心思想: 只关心终点,不关心路径。
-
比喻: 命令笔尖从A点移动到B点,但笔尖在移动过程中是抬起来的,在空中以一条不可预测的、通常是最快的路径移动过去。我们不在乎它怎么走,只要求它最终准确到达B点。
-
技术细节:
-
路径: 不确定。控制器通常会优化每个关节的运动,使得总运动时间最短。路径通常是一条在关节空间中规划的不规则曲线。
-
驱动方式: 控制器计算出每个关节轴需要旋转的角度,然后所有轴同时启动、同时停止(或以优化后的速度曲线运行),以最快速度到达目标点。
-
应用场景: 上下料、码垛、点焊、在多个工作位置之间快速移动等。只要移动过程中不会与周围环境发生干涉,就可以使用PTP。
-
2. 线性
-
全称: Linear Motion
-
中文: 直线运动
-
核心思想: 路径必须是条精确的直线。
-
比喻: 命令笔尖从A点移动到B点,并且笔尖是贴着纸面移动的,必须在纸上画出一条绝对笔直的线段。
-
技术细节:
-
路径: 在笛卡尔空间中规划的一条严格直线。
-
驱动方式: 为了实现末端严格的直线运动,机器人控制器需要进行非常复杂的实时逆运动学解算。它会在直线的起点和终点之间插入无数个中间点(即“插补”),并对每一个中间点都计算出一组关节角度。通过连续、同步地控制所有关节轴微小的运动,来合成末端的直线路径。
-
应用场景: 涂胶、焊接、切割、打磨、检测等任何需要让工具沿精确直线路径工作的场合。
-
3. 圆形
-
全称: Circular Motion
-
中文: 圆弧运动
-
核心思想: 路径必须是条精确的圆弧或整圆。
-
比喻: 命令笔尖从A点开始,经过一个辅助点B,最终到达C点,并在纸上画出一段光滑的圆弧。
-
技术细节:
-
路径: 在笛卡尔空间中规划的一段圆弧。通常需要三个点来定义:起点、圆弧上的一点(辅助点)、终点。
-
驱动方式: 这是三种运动中最复杂的一种。控制器需要进行圆弧插补,计算圆弧路径上每一个中间点的位姿,并对每一个点进行逆运动学解算,精确控制所有关节的协调运动。
-
应用场景: 喷涂瓶盖、焊接圆形焊缝、进行圆形切割等。
-
-
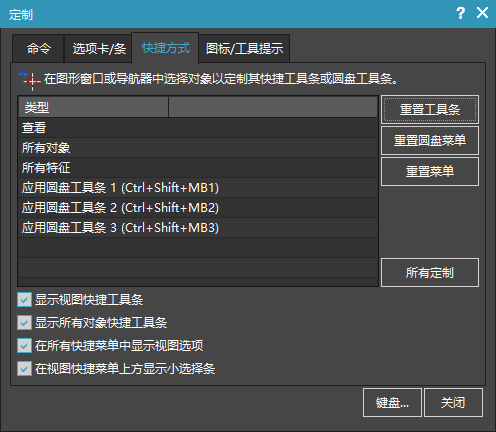
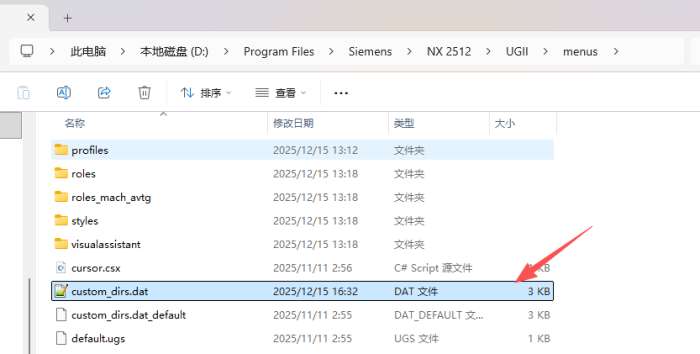
那么问题来了,很多同学导入机器人,建立模型没有线性,圆形,PTP

- 相对来说,这个问题其实很简单就可以解决
-














- 最新
- 最热
只看作者