开通会员 尊享会员权益
登录
注册
找回密码
快速登录
投稿
发布文章
发布帖子
首页
NEW
圈子
热
首页
NEW
圈子
热
开通会员 尊享会员权益
登录
注册
找回密码
快速登录
MCD教程
共1篇
排序
更新
发布
浏览
点赞
评论
收藏
售价
积分
销量
随机
更新
浏览
点赞
评论
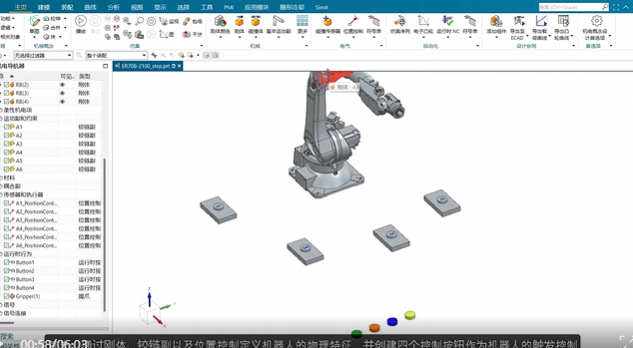
NX MCD条件路径与滑轨机器人仿真教程
先定义机器人物理特征和控制按钮,创建含所有点位的路径并拆分,添加带触发条件的独立仿真序列,测试按钮触发功能;再移动机器人定义释放轨迹,复位后为基座加机电功能,通过仿真序列控制滑动...
教程分享
0
51
12
HI!请登录
登录
注册
社交账号登录
7条讨论
最新NX2406安装教程
TOP1
NX管路PMI自动标注功能/教程
1年前
4条讨论
TOP2
NX/UG新版本“测量功能”详细讲解
1年前
2条讨论
TOP3
NX2406.3000升级包下载
1年前
2条讨论
TOP4
解决NX MCD机电概念设计,反算机构驱动控制6轴机器人,没有线性,圆形,PTP等姿势
1个月前
1条讨论
TOP5
某模圣软件旗舰版NX/UG自动编程外挂免费使用
1年前
1条讨论
TOP6
发布文章
创建话题
创建圈子
发布帖子
登录
没有账号?立即注册
用户名或邮箱
登录密码
记住登录
找回密码
登录
社交账号登录
注册
已有账号,立即登录
设置用户名
设置密码
重复密码
注册