
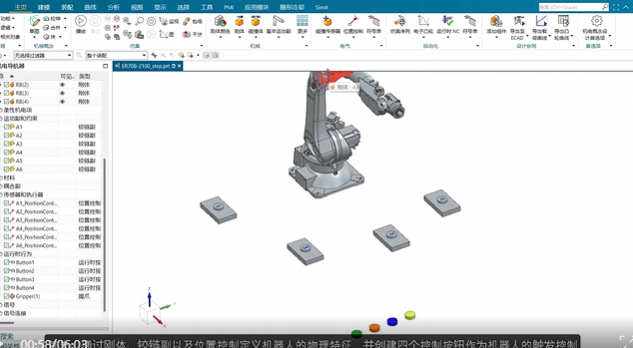
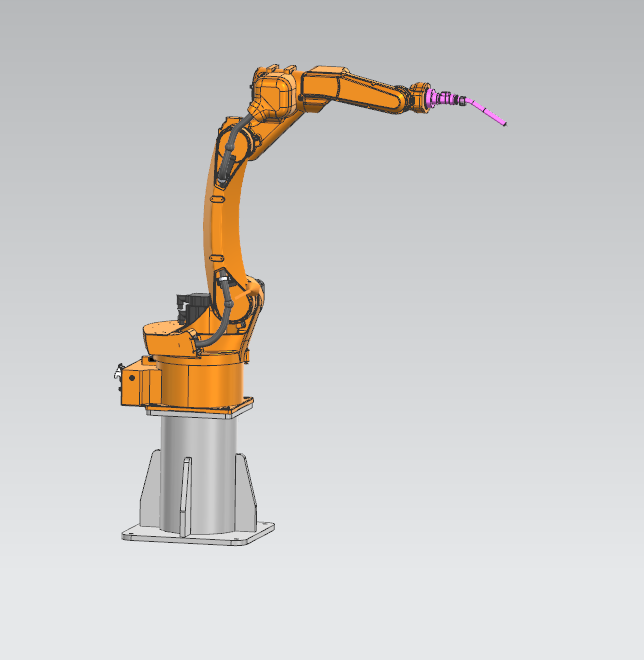
先定义机器人物理特征和控制按钮,创建含所有点位的路径并拆分,添加带触发条件的独立仿真序列,测试按钮触发功能;再移动机器人定义释放轨迹,复位后为基座加机电功能,通过仿真序列控制滑动、释放、回位并实现循环,完成测试
视频来源:https://mp.weixin.qq.com/s/dAsEc1Fac4O7qczl3TDqLA

© 版权声明
版权归作者所有,未经允许请勿转载, 部分文章、图片、视频、资料、来自互联网,若有侵权请联系站长删除。
THE END










暂无评论内容